One Giant Leap for Robotkind
A new way to explore the moon - by Joseph Church
It has been more than 50 years since humans last walked on the Moon. While the Apollo missions were extraordinary achievements, astronauts could only explore small, carefully chosen areas. Safety concerns and the Moon’s harsh environment placed clear limits on where people could go and what sites they could reach.
Interest in lunar exploration is growing again, with new missions planned for the coming decade. Yet many of the Moon’s most scientifically compelling regions remain difficult to access.
Steep crater walls, boulder fields, and underground lava tubes are still beyond the reach of current exploration strategies.
Robotics offers a way to explore this terrain without exposing astronauts to those risks. To date, however, most robotic space rovers have been designed around tightly defined mission requirements and expected environments. Wheeled rovers can cover long distances efficiently, but loose soil and steep, sandy slopes can cause loss of traction or complete immobilization.
But, the lunar surface is far from uniform. Flat plains, loose regolith, rocky slopes, and steep terrain can all exist within a small area. Exploring such variation calls for a different kind of system. We need a multi-purpose tool, a Swiss Army knife.
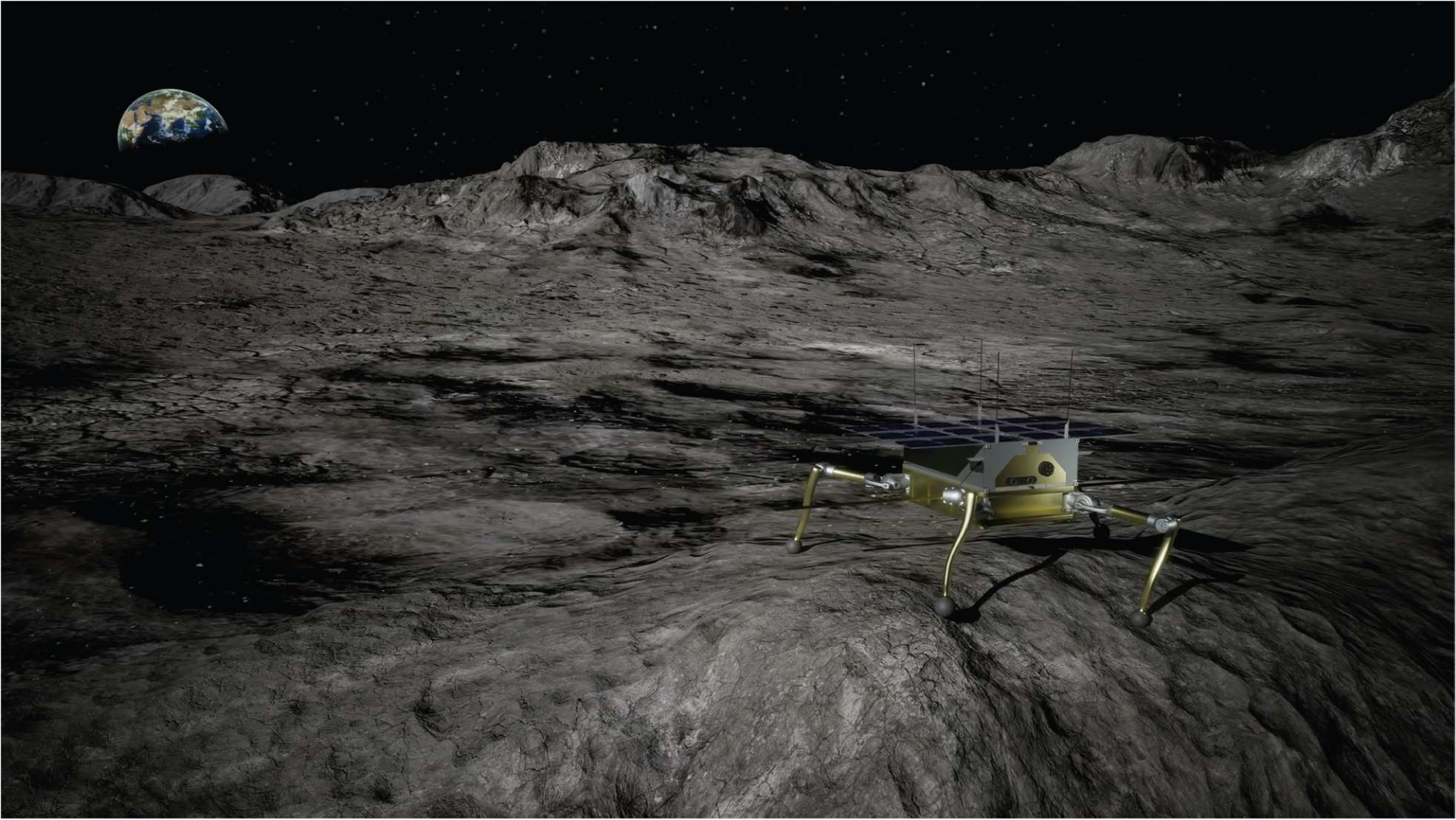
At the Robotic Systems Lab, we are developing a legged robot designed to walk, climb, and jump across this range of terrain. Rather than optimizing for a single site, the goal is a general-purpose explorer that can operate in environments that are only partially known in advance.
This work points toward a new approach to planetary exploration. By building robots that can adapt to uncertain terrain, we are no longer limited to the safest or easiest places to reach. Instead, exploration can be guided by scientific questions, not mobility constraints, opening up previously inaccessible regions of the moon, and beyond.
Text by Joseph Church

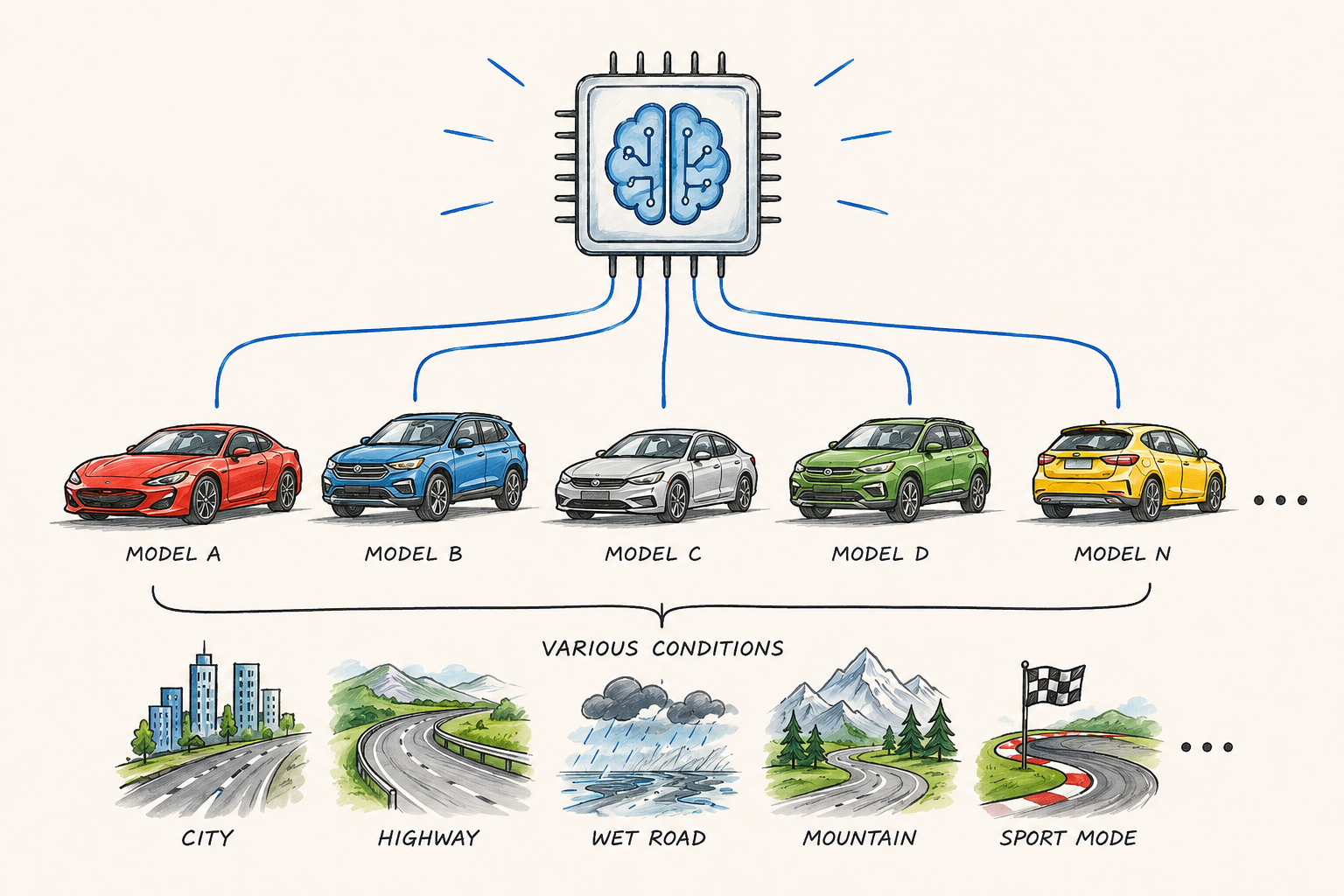







Decision making for cascading uncertainty - by Mengmeng Li